Datasets¶
The datasets contain properties of an object. They are added to an object by some modules.
For example, the base properties of a path or a contour are added by the “Track objects” module. The color average property is added by the module “Extract the contours’ images”.
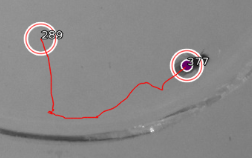
Path¶
| Property | Sub-property | Description | Provided by the module |
|---|---|---|---|
| position | |||
| x | X coordinate | ||
| y | Y coordinate | ||
| velocity | |||
| x | X velocity component | ||
| y | Y velocity component | ||
| absolute | sqrt(X*X+Y*Y) | ||
| acceleration | |||
| x | X velocity component | ||
| y | Y velocity component | ||
| absolute | sqrt(X*X+Y*Y) | ||
| color average | Extract the contours’ images | ||
| red | Average red color on a circle around each position of the path. | ||
| gree | Average green color on a circle around each position of the path. | ||
| blue | Average blue color on a circle around each position of the path. | ||
| motion | Number of pixels changed on a circle around each position of the path. | Motion |
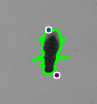
Contours¶
| Property | Sub-property | Description | Provided by the module |
|---|---|---|---|
| position | |||
| x | X coordinate | ||
| y | Y coordinate | ||
| velocity | |||
| x | X velocity component | ||
| y | Y velocity component | ||
| absolute | sqrt(X*X+Y*Y) | ||
| acceleration | |||
| x | X velocity component | ||
| y | Y velocity component | ||
| absolute | sqrt(X*X+Y*Y) | ||
| color average | Extract the contour’s images | ||
| red | Average red color on a circle around each position of the path. | ||
| gree | Average green color on a circle around each position of the path. | ||
| blue | Average blue color on a circle around each position of the path. | ||
| motion | Number of pixels changed on a circle around each position of the path. | Motion | |
| area | Contour area | ||
| perimeter | Contour perimeter | ||
| equivalent diameter | = sqrt(4*area/PI) | ||
| bounding rect | Result of the OpenCV function cv2.boundingRect | ||
| left x | |||
| left y | |||
| width | |||
| height | |||
| aspect ratio | = (bounding rect > width) / (bounding rect > height) | ||
| area | |||
| perimeter | = 2*(bounding rect > width) + 2*(bounding rect > height) | ||
| equivalent diameter | = sqrt(4* (bounding rect > area) /PI) | ||
| extend | = area / (bounding rect > area) | ||
| fit ellipse | result of the OpenCV function cv2.fitEllipse | ||
| center x | |||
| center y | |||
| major axis size | |||
| minor axis size | |||
| angle | |||
| extreme points | The 2 furthest points to the center | ||
| p1 | |||
| p1 > x | |||
| p1 > y | |||
| p2 | |||
| p2 > x | |||
| p2 > y | |||
| angle | |||
| convex hull | |||
| area | |||
| perimeter | |||
| equivalent diameter | = sqrt( 4* (convex hull > area) /PI) | ||
| solidity | = area / (convex hull > area) | ||
| rotated rectangle | result of the OpenCV function cv2.minAreaRect | ||
| center x | |||
| center y | |||
| width | |||
| height | |||
| angle | |||
| minimum enclosing circle | result of the OpenCV function cv2.minEnclosingCircle | ||
| x | |||
| y | |||
| radius | |||
| minimum enclosing triangle | result of the OpenCV function cv2.minEnclosingTriangle | ||
| p1 | |||
| p1 > x | |||
| p1 > y | |||
| p2 | |||
| p2 > x | |||
| p2 > y | |||
| p3 | |||
| p3 > x | |||
| p3 > y | |||
| perimeter | = dist(p1, p2) + dist(p2, p3) + dist(p3, p1) | ||
| moments | |||
| m00, ..., m03, mu20, ..., mu03, nu20, ..., nu03 | All of the moments up to the third order of a polygon or rasterized shape. Result of the function cv2.moments from the OpenCV library. | ||
| hu moments | |||
| hu[0], ..., hu[7] | The seven Hu invariant given by the function cv2.HuMoments from the OpenCV library |